BPE_7
1 Nachweis Dreieck (k. A.)
In einem kartesischen Koordinatensystem sind die Punkte \(A(1|2|5)\), \(B(2|7|8)\) und \(C(-3|2|4)\) gegeben.
a) Weise nach, dass \(A, B\) und \(C\) Eckpunkte eines Dreiecks sind.
b) Für jede reelle Zahl \(a\) ist ein Punkt \( D_a(a|2+a\sqrt{2}|5+\sqrt{2}) \) gegeben. Bestimme alle Werte von \(a\), für die die Strecke von \( A\) nach \(D_a\) die Länge 2 hat.
| AFB k. A. - K1 K2 K5 | Quelle IQB | #iqb |
2 Eckpunkte einer Pyramide (k. A.)
In einem kartesischen Koordinatensystem ist die gerade Pyramide ABCDS gegeben. Die Kantenlänge der quadratischen Grundfläche ist 5, die Höhe der Pyramide 7.
a) Gib mögliche Koordinaten der Eckpunkte der Pyramide an.
b) Mindestens einer der Eckpunkte soll so verschoben werden, dass sich das Volumen der Pyramide vervierfacht. Dafür gibt es mehrere Möglichkeiten. Gib für zwei dieser Möglichkeiten jeweils die Koordinaten der verschobenen Eckpunkte an und begründe deine Angabe.
| AFB k. A. - K1 K2 K5 | Quelle IQB | #iqb |
3 Nachweis Quader (k. A.) 𝕃
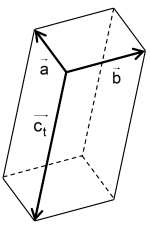
Die Vektoren \(\vec{a}= \left(\begin{array}{c} 2 \\ 1 \\ 2 \end{array}\right)\),\(\vec{b}= \left(\begin{array}{c} -1 \\ 2 \\ 0 \end{array}\right)\) und \(\vec{c_t}= \left(\begin{array}{c} 4t \\ 2t \\ -5t \end{array}\right)\) spannen für jeden Wert von \( t \in \mathbb{R}\setminus\{0\}\) einen Körper auf. Die Abbildung zeigt den Sachverhalt beispielhaft für einen Wert von \(t\).
a) Zeige, dass die aufgespannten Körper Quader sind.
b) Bestimme diejenigen Werte von \(t\), für die der zugehörige Quader das Volumen 15 besitzt.
| AFB k. A. - K1 K2 K5 | Quelle IQB | #iqb |
4 Pyramidenvolumen (k. A.)
Betrachtet wird die Pyramide \(ABCS\). Ihre Grundfläche ist das rechtwinklige Dreieck \(ABC\); die Hypotenuse \(\overline{AB}\) ist 5 cm lang, die Kathete \(\overline{AC}\) 4 cm. Die Kante \(\overline{CS}\) steht senkrecht zur Grundfläche und hat eine Länge von 7 cm.
a) Berechne das Volumen der Pyramide.
b) Die Pyramide soll in einem Koordinatensystem dargestellt werden, in dem eine Längeneinheit 1 cm entspricht. Gib mögliche Koordinaten der Eckpunkte der Pyramide an.
| AFB k. A. - K2 K5 K6 | Quelle IQB | #iqb |
5 Berechnungen am Quader (k. A.) 𝕃

Die Abbildung zeigt einen Quader sowie die Ortsvektoren der Eckpunkte \(A, B\) und \(D\). Die Grundfläche \(OABC\) des Quaders ist quadratisch.
a) Beschreibe die Lage des Punkts, zu dem der Ortsvektor \(\frac{1}{2}\cdot (\vec{b}-\vec{a})\) gehört.
Der Punkt \(P\) hat den Ortsvektor \(\frac{1}{2}\vec{b}+ \vec{d}\).
b) Zeichne \(P\) in die Abbildung ein.
c) Begründe, dass der Wert des Terms \(\vec{b} \circ \overline{OP}\) nur von der Seitenlänge der Grundfläche abhängt.
| AFB k. A. - K1 K2 K4 K5 K6 | Quelle IQB | #iqb |
6 Rasenfläche (k. A.) 𝕃
Die Punkte \(A(0|0|0), B(18|0|1,5), C(12|10|1), D(12|15|1)\) und \(E(0|15|0)\) stellen modellhaft die Eckpunkte einer ebenen Rasenfläche
dar (vgl. Abbildung). Die Strecken \(\overline{AB}\) und \(\overline{DE}\) sind parallel.
Im verwendeten Koordinatensystem entspricht eine Längeneinheit einem Meter in der Wirklichkeit.
a) Zeige, dass auch \(\overline{AE}\) und \(\overline{CD}\) parallel sind und dass \(\overline{CD}\) und \(\overline{DE}\) einen rechten Winkel einschließen.
b) Ausgehend vom Ansatz \(|\overline{AE}| \cdot |\overline{DE}| + \frac{1}{2}\cdot (|\overline{AB}|-|\overline{DE}|)\cdot \bigl(|\overline{AE}|-|\overline{CD}|\bigl) \) kann eine Größe berechnet werden, die im betrachteten Sachzusammenhang eine Rolle spielt. Nenne diese Größe und erläutere den gegebenen Ansatz.
Die Rasenfläche wird von einem Roboter gemäht, der die Form eines flachen Zylinders hat. Zur Beschreibung der Bewegung des Roboters wird der Mittelpunkt seiner kreisförmigen Unterseite betrachtet, die einen Radius von 20 cm hat. Es soll vereinfachend davon ausgegangen werden, dass dieser Mittelpunkt die Rasenfläche berührt.
Die Position des Mittelpunkts wird zunächst durch \(P(3,6|8|0,3)\) dargestellt (vgl. Abbildung). Die anschließende Bewegung des Mittelpunkts verläuft im Modell entlang der Gerade g, die durch P verläuft und den Richtungsvektor \(\vec{a}= \left(\begin{array}{c} 12 \\ -4 \\ 1 \end{array}\right)\) hat. Dabei bewegt sich der Roboter auf den durch \(\overline{BC}\) dargestellten Rand der Rasenfläche zu.
c) Berechne die Koordinaten des Punkts \(Q\), in dem \(g\) die Strecke \(\overline{BC}\)schneidet. (zur Kontrolle: \(Q(15,6|4|1,3)\) )
d) Weise nach, dass der Winkel, unter dem sich der Roboter dem Rand der Rasenfläche nähert, etwa 41° groß ist.
e) Der Roboter ändert seine Richtung, sobald der Rand seiner Unterseite den Rand der Rasenfläche erreicht. Der Punkt, der die Position des Mittelpunkts im Moment der Richtungsänderung darstellt, wird mit \( S \) bezeichnet. Berechne mithilfe einer geeigneten Skizze die Koordinaten von \(S\).
| AFB k. A. - K1 K2 K3 K4 K5 K6 | Quelle IQB | #iqb |